密碼找回
賬號找回
刪除信息
常見問題
Panasonic機器人TL-G3系列維修保養(yǎng)已認證
利訊達機器人觸摸屏維修就選這家
松下機器人LAPRISS系列維修保養(yǎng)周期短
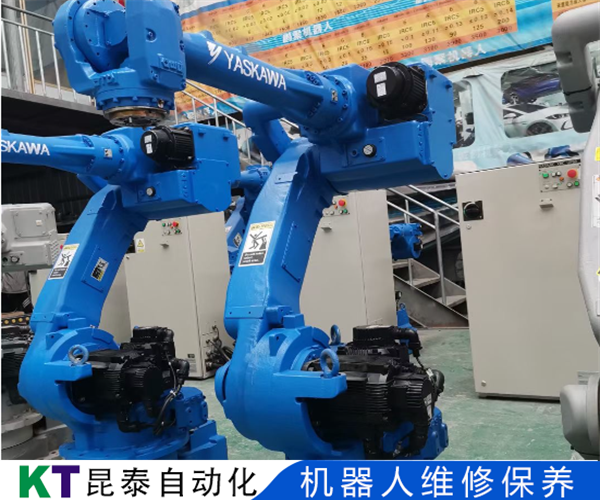
安川機器人MOTOMAN-GP12維修保養(yǎng)小竅門
2年
微信在線
13961122002
那智越機器人主板維修關(guān)鍵點
¥530
發(fā)那科機器人LRMate200iD/7WP維修保養(yǎng)效果好
OTC歐地希機器人FD-V100維修保養(yǎng)半天可取
史陶比爾機器人TX90XLpaint維修保養(yǎng)案例一
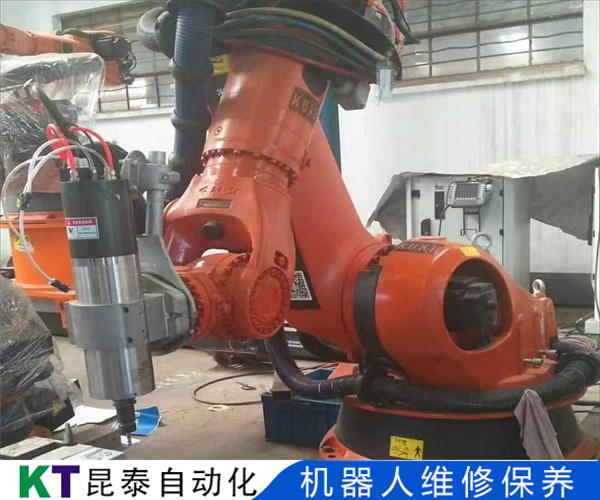
kawasaki線性機器人維修保養(yǎng)詳情必讀
安川機器人MOTOMAN-AR1730維修保養(yǎng)半天可取