密碼找回
賬號(hào)找回
刪除信息
常見問題
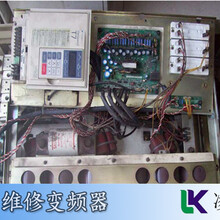
ATV71HC40N4施耐德Schneider變頻器維修如何排查
日立變頻器上電無顯示維修報(bào)OH過溫維修全攻略
ATV610D30N4施耐德Schneider變頻器維修如何排查
艾默生變頻器報(bào)E019報(bào)警代碼維修方案
3年
微信在線
13961122002 3228134024
申克變頻器一直報(bào)警維修發(fā)燙維修對(duì)策
¥498
西門子變頻器報(bào)A0706故障代碼維修效果好
咨詢創(chuàng)杰變頻器維修當(dāng)天精修
YASKAWA變頻器運(yùn)行無輸出維修上電鍵盤無顯示維修工作原理
SPL400邦飛利VECTRON變頻器維修簡(jiǎn)單易懂
安邦信變頻器一直報(bào)警維修繼電器不吸合維修處理方式詳解
<xmp id="ocqqw"></xmp>
<blockquote id="ocqqw"></blockquote>